

商铺名称:金土石科技(北京)有限公司
联系人:刘云云(小姐)
联系手机:
固定电话:
企业邮箱:grockandsoil@126.com
联系地址:北京市通州区新华西街56号1幢10层1007-1室
邮编:101110
联系我时,请说是在智能安防网上看到的,谢谢!

CoppeliaSim软件概述
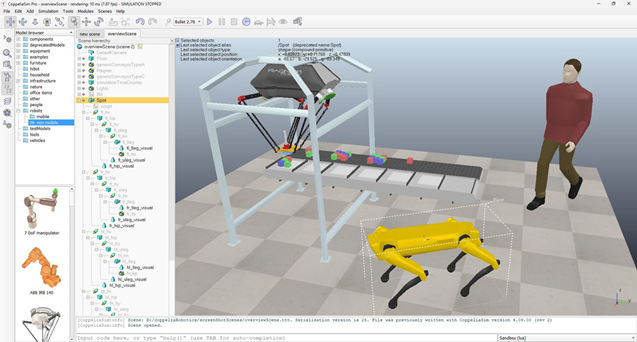
在机器人学,自动化控制和虚拟现实等领域,CoppeliaSim(原V-rep)是一款备受推崇的先进的强大的跨平台的具有集成开发环境的机器人仿真模拟器软件。被称为机器人仿真模拟“瑞士”。
CoppeliaSim基于分布式控制体系结构:每个对象/模型可以通过嵌入式脚本、插件、ROS或BlueZero节点、远程API客户端或定制解决方案进行单独控制。这使得CoppeliaSim非常通用,是多机器人应用的理想选择。控制器可以用C/C++、Python、java、Lua、MATLAB来编写。
CoppeliaSim旨在为机器人研究和开发提供仿真环境。它可以帮助用户进行机器人建模、编程和仿真,并提供了丰富的工具和库,如机器人运动学、动力学模型等。CoppeliaSim支持多种编程语言,如Python、C++、Lua等,并具有易于使用的GUI界面,使得用户可以轻松地创建、控制和监视机器人仿真。
CoppeliaSim 使用运动学引擎进行正向和反向运动学计算,并使用多个物理模拟库(Bullet、ODE、Vortex、Newton Game Dynamics)来执行刚体模拟。通过将各种对象(网格、关节、各种传感器、点云、OC 树等)组装成层次结构来构建模型和场景。插件提供的附加功能包括:运动规划(通过OMPL)、合成视觉和成像处理(例如通过OpenCV)、碰撞检测、最小距离计算、自定义图形用户界面和数据可视化(例如通过绘图)。
相较于在真实环境中调试,利用模拟环境先进行算法调试,确认无误后再部署到实体机器上,不仅提高了安全性,还能显著加速开发进程。此外,鉴于某些机器人硬件成本高昂且对物理环境要求苛刻,许多科研人员更倾向于采用低成本的方式进行训练。因此,机器人模拟器得以广泛应用。
CoppeliaSim已经被广泛用于快速算法开发、工厂自动化仿真、快速原型和验证、机器人相关教育、远程监控、安全双重检查、数字孪生等。是广泛用于工业、教育和研究的机器人模拟器。
CoppeliaSim体系架构
CoppeliaSim 是一个基于CoppeliaSim库的集成应用程序,它允许通过算法、系统和配置原型设计、运动学设计和数字孪生创建等来测试和验证复杂的机器人系统。CoppeliaSim 可以被视为一个可配置的仿真抽象层,提供了极大的灵活性和敏捷性。
主要功能:
●五种物理引擎:MuJoCo、Bullet、ODE、Vortex和Newton,Drake即将推出
●分布式控制架构:每个对象/模型可以通过嵌入脚本、插件或外部客户端单独控制
●多种编程语言:C/C++、Python、Lua、Java、MATLAB等
●广泛的功能:动力学、运动学、碰撞检测、最小距离计算、体积接近传感器、力/扭矩传感器、视觉传感器、点云、OC树、图像处理、路径规划、运动库、自定义用户界面、广泛的导入导出功能等
●各种通信接口:ROS/ROS2、ZeroMQ、远程API、事件、WebSocket等
●场景和模型在不同平台上可移植
体系架构概览图:

场景/模型/对象

场景
●包含模型和对象
● 具有触发变更事件的属性
模型
● 由对象和其他可能的模型组成
● 具有触发变更事件的属性
对象
●通过父子关系连接,可能还通过其他约束条件
● 具有触发更改事件的属性
● 有多种类型:网格、关节/电机、相机、灯光、参考框架、接近传感器、视觉传感器、力传感器、路径、图、点云、八叉树、脚本对象
脚本对象:特殊对象
●CoppeliaSim仿真分布式控制架构的核心
● 可运行嵌入式Python或Lua代码
● 可以使用多线程或非多线程方式运行
● 用于控制、定制、接口、监控、通信等
属性和事件
所有内部变量或状态都可以作为属性处理:它们可以是各种类型(例如布尔值、整数、浮点数、表格、四元数等),修改它们会触发事件,这些事件可以被脚本、插件和扩展程序订阅。

